用意するもの
DCモーター……1個
アーテックブロック
四角……5個
第11回でつくったキツツキロボ
スタディーノ(カバー台座付き)……1個
アーテックブロック
四角……3個
三角……1個
目……2個
赤外線フォトリフレクタ……1個
サーボモーター……1個
センサー接続ケーブル……1本
USBケーブル ミニB……1本
電池ボックス……1個
単3形アルカリ乾電池……3本
ジブン専用パソコン……1台
※普通のパソコンでもできるよ。普通のパソコンを使っている人は、「Studuinoでラクラク電子工作」の第1回を参考にしてね。
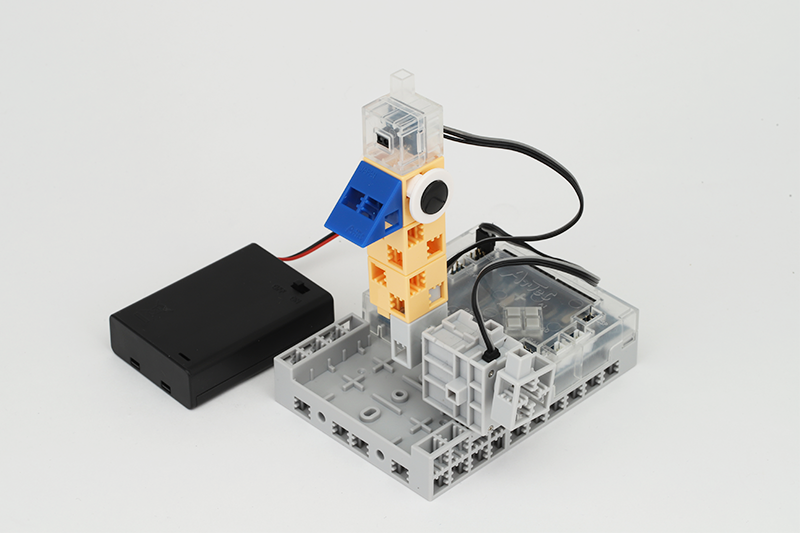
キツツキロボの改造
① 前回つくったキツツキロボを用意する。まだつくっていない人は、「キツツキロボを組み立てよう」を見ながら組み立ててね。
② 電池ボックスのスイッチが「OFF」になっていることを確認してから、作業がしやすいように、赤外線フォトリフレクタ、サーボモーター、電池ボックスのケーブルを抜く。
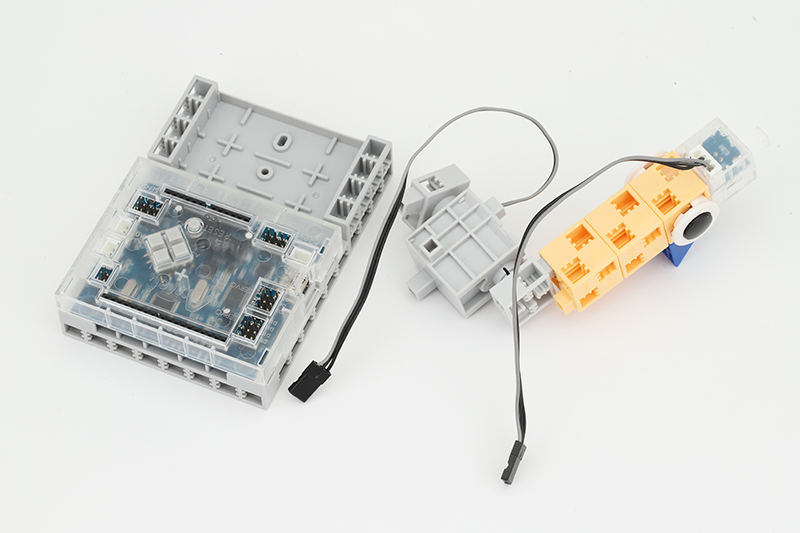
③ スタディーノの台座から、サーボモーターごと頭を取り外す。
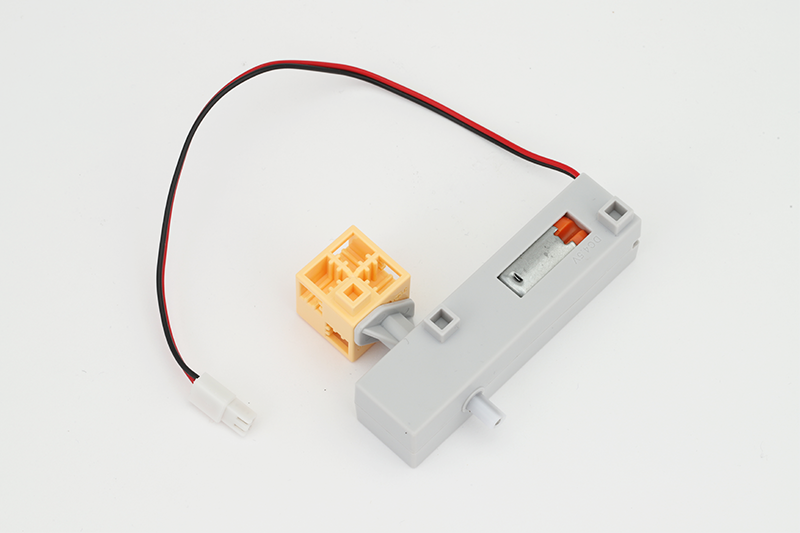
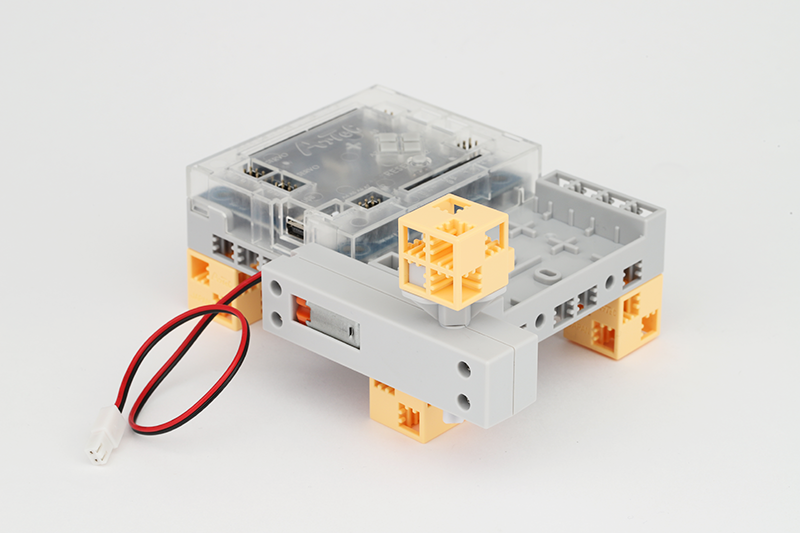
④ DCモーターを用意する。ポッチを上、ケーブルを奥にしたとき、向かって左側の回転軸だけに軸受けがある状態にする。

⑤ DCモーターの軸受けに、ポッチが上を向くように基本四角ブロックを取り付ける。
⑥ 基本四角ブロックが上にくるようにして、DCモーターをスタディーノの台座に取り付ける。ミニUSBケーブルの差込口をふさがないように注意しよう。



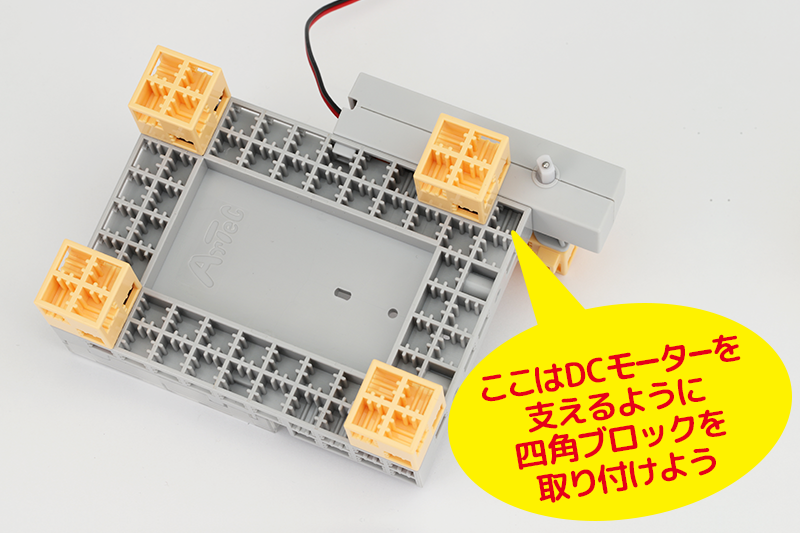
⑦ スタディーノの台座の裏に、脚となる基本四角ブロックを4つ取り付ける。
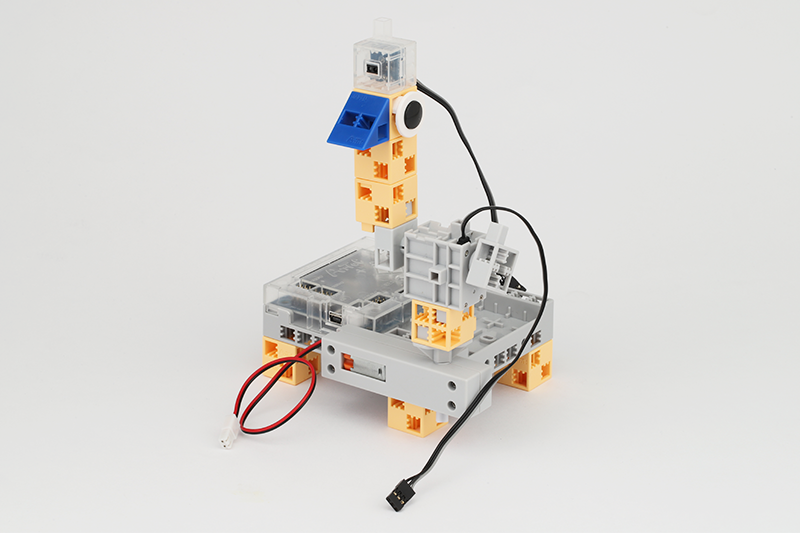
⑧ 頭のサーボモーターを、DCモーターの軸受けに取り付けた基本四角ブロックに差し込む。
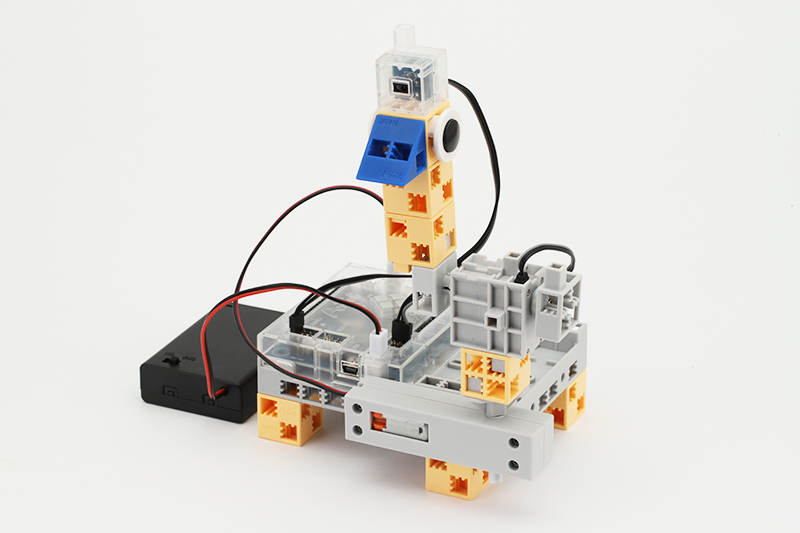
キツツキロボの配線
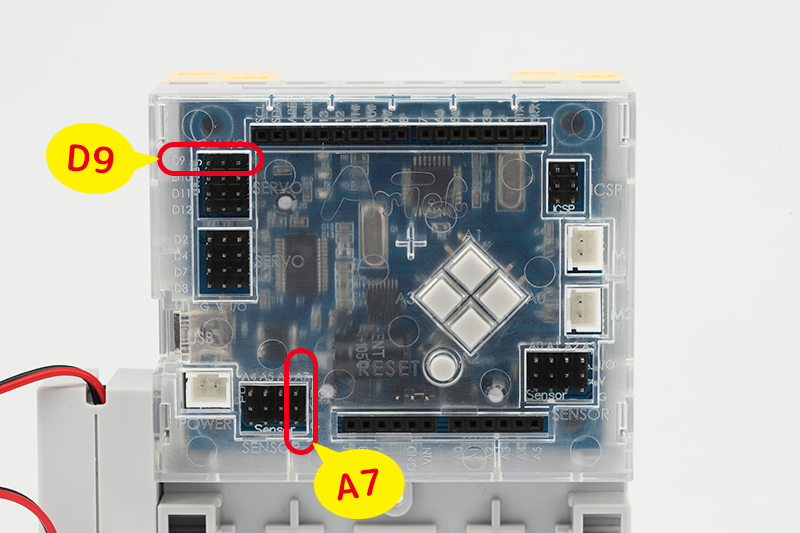
① 赤外線フォトリフレクタとサーボモーターのケーブルを、スタディーノにつなぐ。赤外線フォトリフレクタは「A7」、サーボモーターは「D9」と刻印されているピンに差し込もう。このとき、ケーブルの灰色の線がスタディーノの内側にくるようにすること。
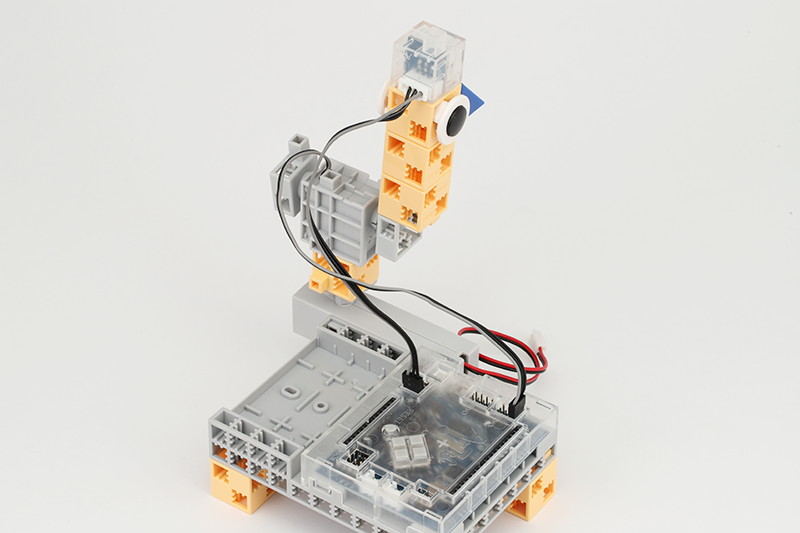
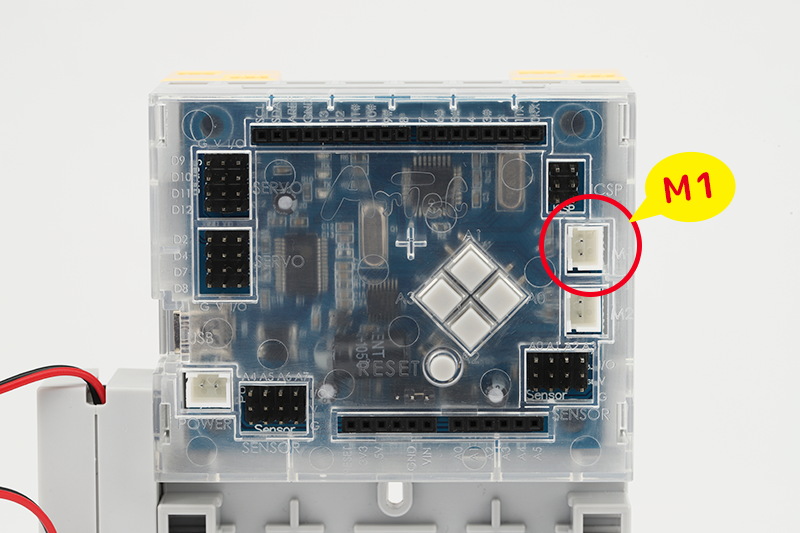
② DCモーターのケーブルをつなぐ。爪の向きに注意して、「M1」と刻印されたピンに差し込もう。
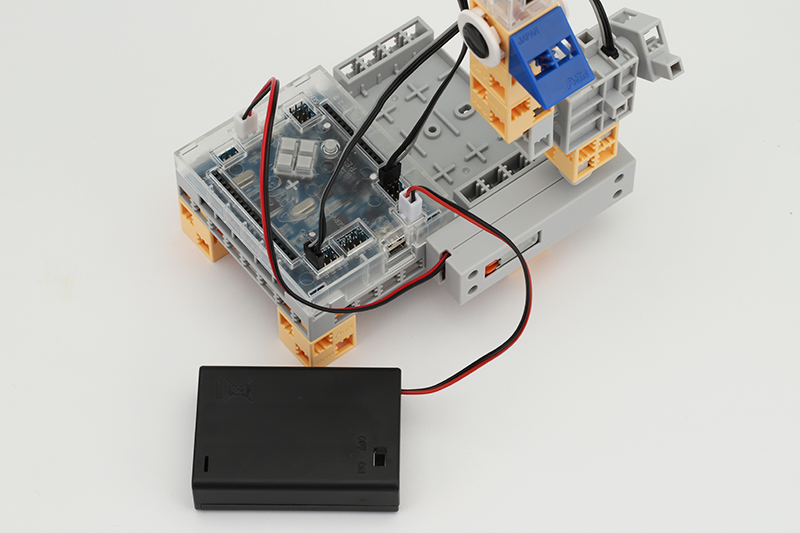
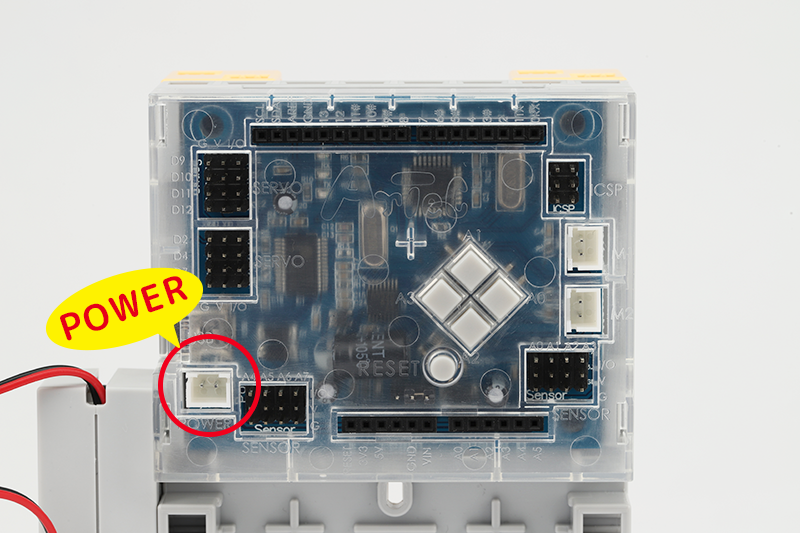
③ 電池ボックスをつなぐ。スイッチが「OFF」になっていることを確認してから、爪の向きに注意して、「POWER」と刻印されているコネクターに差し込もう。
④ ミニBのUSBケーブルで、スタディーノとラズパイをつなぐ。ラズパイの電源を入れたときに、スタディーノの赤いLEDが点灯すればOKだ。
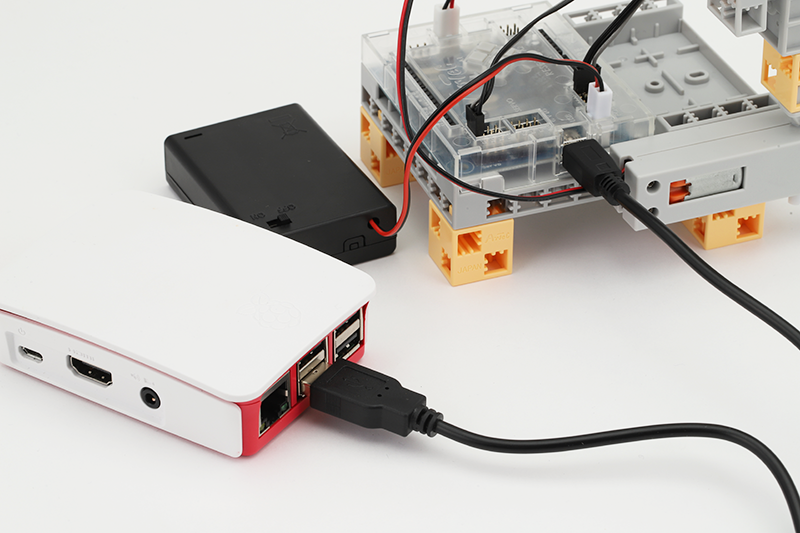
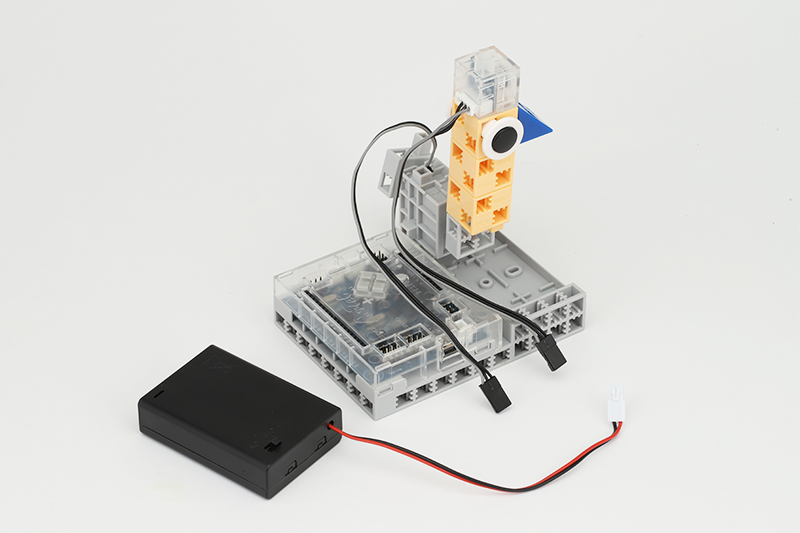
⑤ これでキツツキロボの改造は終わりだ。プログラミングを始めよう!
監修