「kurikitのビジュアルプログラミングでココロキットをプログラミングしてみよう」でココロキットの使い方はわかったかな。ここでは「くじらちゃんロボットをつくってみよう」でつくったロボットに、ココロキットをつないで動かしていくよ。そのプログラムはkurikitのビジュアルプログラミングでつくっていくぞ。
用意するもの
・ココロキット本体と、単3形電池2本
・くじらちゃんロボット(つくり方は「くじらちゃんロボットをつくってみよう」を参考にしてね)
・パソコンまたはタブレット、スマートフォン
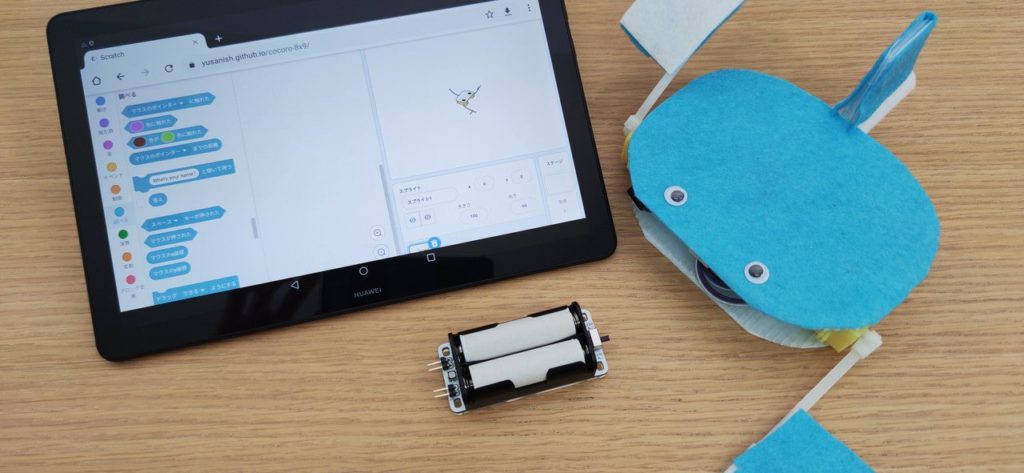
ココロキットとくじらちゃんロボットをつなぐ
それでは、ココロキットとくじらちゃんロボットをつなごう。
① まずは、ココロキットのモーターポートL、モーターポートRに、くじらちゃんロボットのモーターをつなぐ。
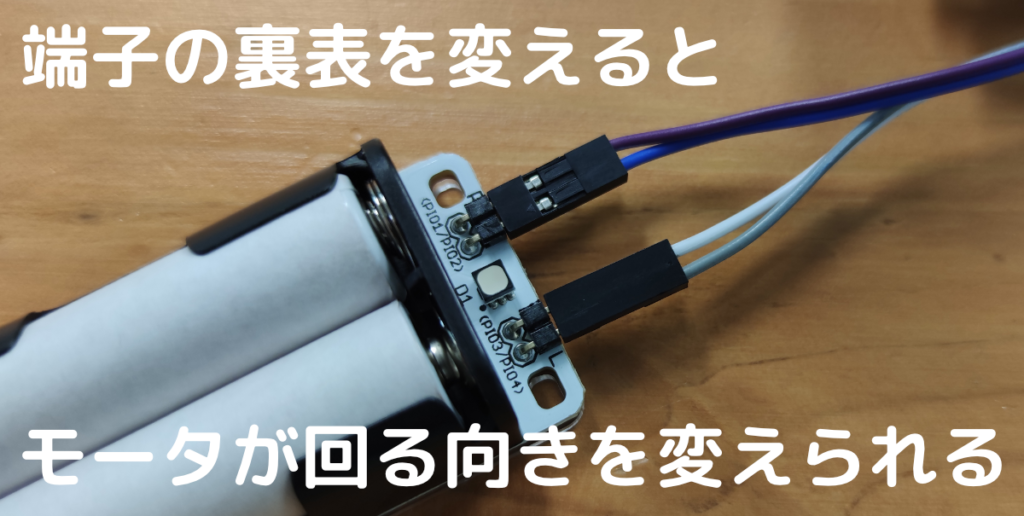
端子をつなぐ向きが、モーターを回転させる方向を決める
今は、端子の裏表を気にせずに端子にさしてみよう。あとで動かしたときに、自分が回転してほしい方向と違ったら、端子を差し替えて試してみよう。
② 接続したらケーブルとモーターポートが簡単に外れてしまわないように、ココロキットをロボットに固定しよう。固定する方法としては、次のような方法がオススメだ。
・ココロキットをロボットの中に入れる
・ココロキットとロボットを両面テープで貼り付ける
③ ココロキットの電源を入れよう。ここからは、パソコンでのプログラミングになるよ。
kurikitのビジュアルプログラミングでくじらちゃんロボットをプログラミング
パソコンでkurikitのビジュアルプログラミングは準備できているかな。kurikitとココロキットをつなぐ方法は「kurikitのビジュアルプログラミングでココロキットをプログラミングしてみよう」の「ココロキットとkurikitのビジュアルプログラミングをつなぐ」を参考にしてね。
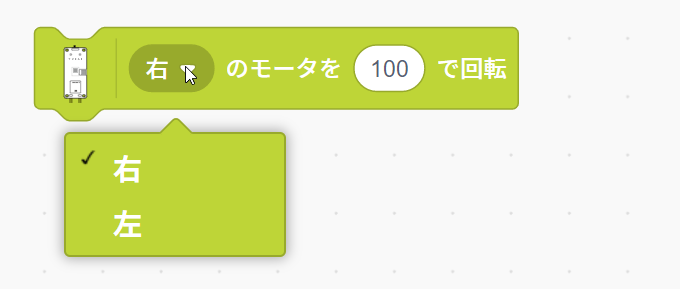
「ココロキット」カテゴリーの中に、「(右▼)のモータを(100)で回転」、「(右▼)のモータを(100)で逆回転」、「(右▼)のモータを止める」というブロックがある。これを使ってロボットを動かすよ。

「(右▼)のモータを(100)で回転」ブロックの(右▼)をクリックすると、左と切り替えられる。
プログラミングをする場所に、「(右▼)のモータを(100)で回転」ブロックと、「(右▼)のモータを止める」ブロックを置こう。ブロック同士はつながなくてもいいよ。
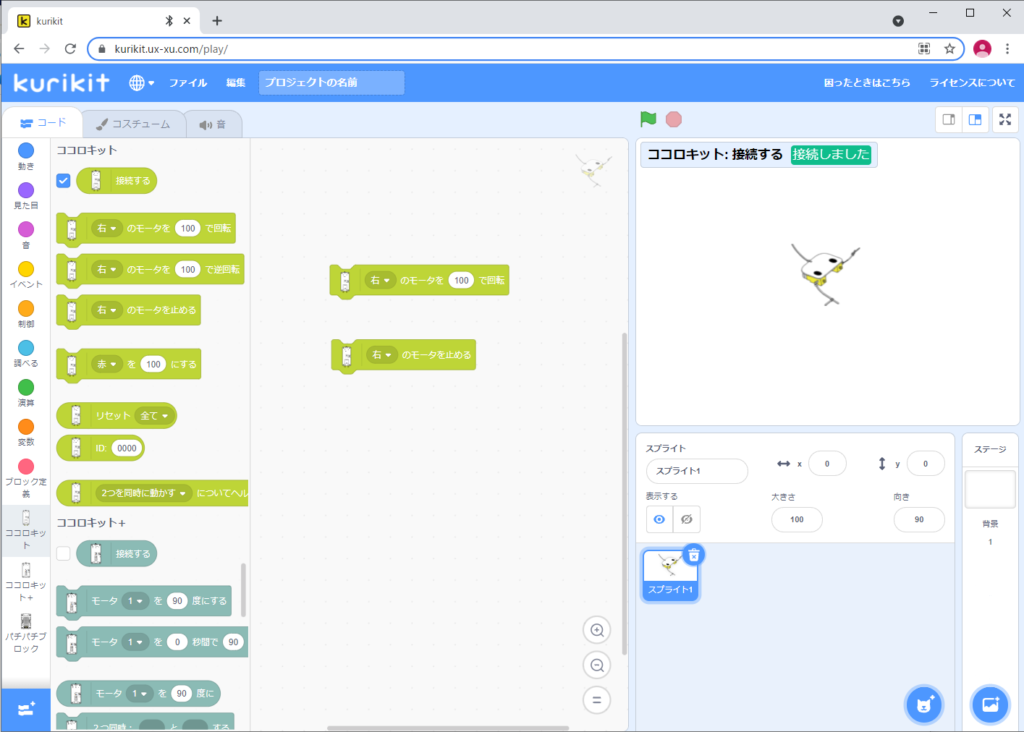
ブロックを置いたら、それぞれのブロックをクリックしてみよう。
「(右▼)のモータを(100)で回転」ブロックをクリックすると、くじらちゃんロボットの片方のひれが動くぞ。「(右▼)のモータを止める」ブロックをクリックすると動きが止まる。これで、くじらちゃんロボットが動き出したね!
くじらちゃんロボットにつないだココロキットと、kurikitのビジュアルプログラミングを接続してプログラムで動かす方法を紹介した動画だ。ここではタブレットを使っているので、タブレットでプログラミングをしたい場合にも参考にしてね。
ここではくじらちゃんロボットのひれを動かしただけだけど、プログラミングでもっと動かすことができるぞ。ぜひいろいろ試してみてね。